|
Program Overview
Registration desk will open at 8h30 every morning
INRIA technical tour is not scheduled yet : too many
attendees have registered for this event
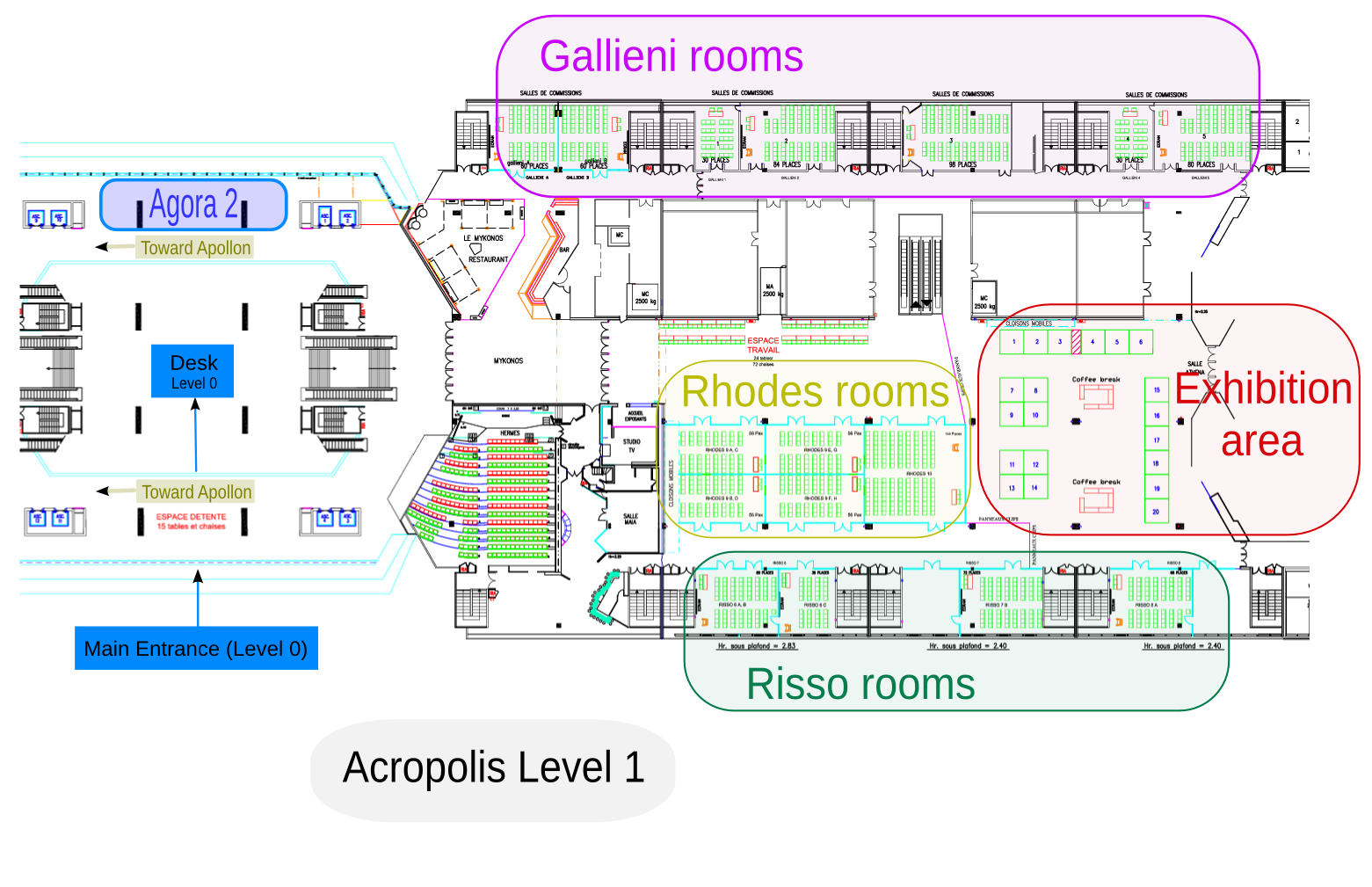
Acropolis Map
Preliminary program
this program is tentative and subject to change, papers for video session are not scheduled yet.
However at this point we will neither modify the
day and time schedule of the sessions nor the distribution of the papers
in the sessions (unless the authors agree with such change). We may however
still modify the presentation order in a given session.
Updated on September 6.
Author index
conference day 1,
conference day 2,
conference day 3,
Program at a glance,
PROGRAM OVERVIEW
Workshops 9/22
Coffee breaks at 10h30, 16h
| Day/Hour |
|
9h-10h | 10h-11h | 11h-12h | 12h-13h | 13h-14h | 14h-15h | 15h-16h | 16h-17h | 17h-18h | 18h-19h |
|---|
| 9/22, Gallieni B | Workshop: Grasp and task learning by imitation |
| 9/22, Rhodes 9AC | Workshop: Current software frameworks in cognitive robotics integrating different computational paradigms |
| 9/22, Rhodes 9BD | Workshop: Current State of the Art and Future Challenges in Nanorobotics |
| 9/22, Rhodes 9EG | Workshop: Self-Reconfigurable Robots |
| 9/22, Risso 7B | Workshop: Visual guidance systems for small autonomous aerial vehicles |
| 9/22, Risso 6AB | Workshop: Workshop on robot simulators: available software, scientific applications and future trends |
| 9/22, Gallieni 2 | Workshop: Robotics Challenges for Machine Learning |
| 9/22, Gallieni 3 | Tutorial: Tutorial on Vision for Robotics |
| 9/22, Rhodes 9FH | Workshop: Multi-Competence Adaptation in Robotics and A-life | Workshop: Fast Marching Method: Theoretical Underpinnings and Applications to Robotics |
| 9/22, Gallieni 5 | Workshop: Teaching Human-Robot Interaction to Humans | Workshop: Modeling, Estimation, Path Planning and Control of All Terrain Mobile Robots |
Technical sessions 9/23, 12 tracks
| Track |
Room |
08:40-10:40 |
10:40-11:00 |
11:00-12:00 |
13:00-14:10 |
14:10-16:10 |
16:10-16:30 |
16:30-18:30 |
P | Apollon |
|
Coffee break |
TuPP
Plenary talk I |
|
|
Coffee break |
|
O | Apollon |
|
Coffee break |
|
Forum: Robots in an human environment |
|
Coffee break |
|
T1 |
Gallieni B; Gallieni B; Gallieni B |
TuAT1 Micro/Nanorobots I
|
Coffee break |
|
|
TuBT1 Micro/Nanorobots II |
Coffee break |
TuCT1
Micro-manipulation |
T2 | Track T2
Rhodes 9EG; Rhodes 9EG; Rhodes 9EG |
TuAT2 Force and Tactile Sensing I |
Coffee break |
|
|
TuBT2 Force and Tactile Sensing II |
Coffee break |
TuCT2
Force Control |
T3 | Track T3
Risso 7B; Risso 7B; Rhodes 9BD |
TuAT3
Kinematics |
Coffee break |
|
|
TuBT3
Dynamics |
Coffee break |
TuCT3 Calibration and Identification |
T4 | Track T4
Rhodes 9BD; Rhodes 9BD; Galieni 3 |
TuAT4
Smart Actuators I
|
Coffee break |
|
|
TuBT4
Smart Actuators II |
Coffee break |
TuCT4
SLAM I |
T5 | Track T5
Risso 8; Risso 8; Risso 8 |
TuAT5
Intelligent Vehicles I |
Coffee break |
|
|
TuBT5
Intelligent Vehicles II |
Coffee break |
TuCT5
Intelligent Vehicles III (Motion Planning & Navigation) |
T6 | Track T6
Rhodes 10; Rhodes 10; Rhodes 10 |
TuAT6
Humanoids, Motion Control |
Coffee break |
|
|
TuBT6
Humanoids, Kinematics, Dynamics |
Coffee break |
TuCT6
Humanoids and Legged Robots |
T7 | Track T7
Gallieni 5; Gallieni 5; Gallieni 5 |
TuAT7
Navigation I |
Coffee break |
|
|
TuBT7
Navigation II |
Coffee break |
TuCT7 Localization and Navigation I |
T8 | Track T8
Gallieni 2; Gallieni 2; Gallieni 2 |
TuAT8
Rehabilitation Robotics I |
Coffee break |
|
|
TuBT8
Rehabilitation Robotics II |
Coffee break |
TuCT8 Medical Robots and Systems, Control |
T9 | Track T9
Rhodes 9AC; Rhodes 9AC; Rhodes 9AC |
TuAT9
Cognitive Human-Robot Interaction |
Coffee break |
|
|
TuBT9 Social Human-Robot Interaction, Gesture, Posture |
Coffee break |
TuCT9
Social, Physical Human-Robot Interaction |
T10 | Track T10
Risso 6AB; Risso 6AB; Risso 6AB |
TuAT10
Aerial Robotics, Control
|
Coffee break |
|
|
TuBT10
Aerial Robotics I |
Coffee break |
TuCT10
Aerial Robotics II |
T11 | Track T11
Gallieni 3; Gallieni 3; Risso 7B |
TuAT11
Learning and Control I |
Coffee break |
|
|
TuBT11
Learning and Control II |
Coffee break |
TuCT11
Autonomous Agents |
T12 | Track T12
Rhodes 9FC; Rhodes 9FC; Rhodes 9FC |
TuAT12
Telerobotics |
Coffee break |
|
|
TuBT12
Cellular and Modular Robots I |
Coffee break |
TuCT12
Cellular and Modular Robots II |
|
Social event:
| GOLD lunch, Acropolis, room Agora 3, 12h-13h |
Welcome reception, Acropolis, 19h-22h |
Technical sessions 9/24: 13 tracks
| Track |
Room |
08:40-10:40 |
10:40-11:00 |
11:00-12:00 |
12:00-12:30 |
13:30-15:30 |
15:30-15:50 |
15:50-17:50 |
P | Apollon |
WeVT15
Videos I |
Coffee break |
WePP
Plenary Talk II |
WeFF
Awards Ceremony |
|
Coffee break |
|
T1 | Rhodes 10; Rhodes 9AC;
Rhodes 9FC |
WeAT1
Localization with RFID, Sonars |
Coffee break |
|
|
WeBT1
Control Architectures, Programming |
Coffee break |
WeCT1
Animation and Simulation |
T2 | Track T2
Gallieni B; Gallieni B;
Gallieni B |
WeAT2
Distributed Robot Systems |
Coffee break |
|
|
WeBT2
Distributed Robot and Multiple Robot Systems |
Coffee break |
WeCT2
Networked, Distributed and Teleoperated Robots |
T3 | Track T3
Risso 6AB; Risso 6AB; Risso 6AB |
WeAT3
Medical Robots and Systems I |
Coffee break |
|
|
WeBT3
Medical Robots and Systems II |
Coffee break |
WeCT3
Assistive robotics for functional therapy application |
T4 | Risso 7B; Risso 8; Risso 8 |
WeAT4
Mechanism Design |
Coffee break |
|
|
WeBT4
Parallel Robots I
|
Coffee break |
WeCT4
Parallel Robots II |
T5 | Gallieni 2; Gallieni 2; Gallieni 2 |
WeAT5
Legged Robots I |
Coffee break |
|
|
WeBT5
Wheeled Robots |
Coffee break |
WeCT5
Locomotion Systems |
T6 | Gallieni 3; Gallieni 3; Gallieni 3 |
WeAT6
Humanoids I |
Coffee break |
|
|
WeBT6
Humanoids II |
Coffee break |
WeCT6
Humanoids III |
T7 | Gallieni 5; Gallieni 5; Gallieni 5 |
WeAT7
SLAM II |
Coffee break |
|
|
WeBT7
SLAM III |
Coffee break |
WeCT7
SLAM & Mapping |
T8 | Rhodes 9EG; Rhodes 9EG;
Risso 7B |
WeAT8
Search and Rescue Robots I |
Coffee break |
|
|
WeBT8
Search and Rescue Robots II |
Coffee break |
WeCT8
Surveillance |
T9 | Rhodes 9AC; Risso 7B;
Rhodes 9EG |
WeAT9
Nonholonomic Motion Planning |
Coffee break |
|
|
WeBT9
Path Planning for Manipulators |
Coffee break |
WeCT9
Motion and Task Planning |
T10 | Rhodes 9FC; Rhodes 9FC;
Rhodes 9AC |
WeAT10
Audition I |
Coffee break |
|
|
WeBT10
Audition II |
Coffee break |
WeCT10
Sharable Robotic Resources |
T11 | Gallieni A; Gallieni A;
Gallieni A |
WeAT11
Field Robots I |
Coffee break |
|
|
WeBT11
Field Robots II |
Coffee break |
WeCT11
Field Robots and Locomotion |
T12 | Track T12
Rhodes 9BD; Rhodes 9BD;
Rhodes 9BD |
WeAT12
Grasping I |
Coffee break |
|
|
WeBT12
Grasping II |
Coffee break |
WeCT12
Dexterous Manipulation and Multifingered Hands |
T13 | Track T13
Risso 8; T1; T2 |
WeAT13
Intelligent Vehicles & Intelligent Transportation Systems |
Coffee break |
|
|
WeBT13 |
Coffee break |
WeCT13 |
T14 | Track T14
Rhodes 10 |
|
Coffee break |
|
|
WeOT14
Special Session Robotics and Cyber Physical Systems |
Coffee break |
WeOT14
Special Session Robotics and Cyber Physical Systems |
|
Social event:
| Bus departure for the banquet, Acropolis, 18h-24h (travel
time: about 20mn). For the return
trip the buses
will stop in front of the Sofitel Acropolis hotel. Participants with
cars willing to go to the banquet on their own will have to request a
map to the registration desk. |
Technical sessions 9/25, 13 Tracks
| Track |
Room |
08:40-10:40 |
10:40-11:00 |
11:00-12:00 |
13:00-15:00 |
15:00-15:20 |
15:20-17:20 |
P | Apollon |
ThVV
Videos II |
Coffee break |
ThPP
Plenary Talk III |
|
Coffee break |
|
P | Agora 2 |
Poster |
Coffee break |
Poster |
|
Coffee break |
|
T1 | Track T1
Rhodes 9AC; Gallieni B;
Gallieni B |
ThAT1
Planning Tools and Robots Training |
Coffee break |
|
ThBT1
Domestic and Service Robots |
Coffee break |
ThCT1
Service Robots |
T2 | Track T2
Rhodes 9BD; Rhodes 9BD;
Rhodes 9EG |
ThAT2
Cooperating Robots, Formation control |
Coffee break |
|
ThBT2
Sensor Network |
Coffee break |
ThCT2
Underactuated Robots |
T3 | Track T3
Rhodes 9EG; Rhodes 9EG;
Rhodes 9BD |
ThAT3
Motion Control |
Coffee break |
|
ThBT3
Adaptive and Motion Control |
Coffee break |
ThCT3
Flexible Arms and Compliant Tasks |
T4 | Track T4
Rhodes 10; Rhodes 10; Rhodes 10 |
ThAT4
Human and Humanoid in Aging Society |
Coffee break |
|
ThBT4
Social Human-Robot Interaction I |
Coffee break |
ThCT4
Social Human-Robot Interaction II |
T5 | Risso 7B; Risso 7B; Rhodes 9FC |
ThAT5
Mapping I |
Coffee break |
|
ThBT5
Mapping II |
Coffee break |
ThCT5
Sensor Fusion |
T6 | Track T6
Risso 8; Risso 8; Risso 8 |
ThAT6
Legged Robots, Dynamics |
Coffee break |
|
ThBT6
Legged Robots II |
Coffee break |
ThCT6
Legged Robots III |
T7 | Track T7
Risso 6AB; Risso 6AB; Risso 6AB |
ThAT7
Localization and Navigation II |
Coffee break |
|
ThBT7
Localization |
Coffee break |
ThCT7
Localization and Computer Vision |
T8 | Track T8
Gallieni 5; Gallieni 5; Gallieni 5 |
ThAT8
Haptics and Virtual Reality |
Coffee break |
|
ThBT8
Haptics I |
Coffee break |
ThCT8
Haptics II |
T9 | Rhodes 9FC; Rhodes 9FC;
Gallieni 2 |
ThAT9
Visual Servoing |
Coffee break |
|
ThBT9
Range Sensing |
Coffee break |
ThCT9
Tracking |
T10 | Track T10
Gallieni 2; Gallieni 2;
Rhodes 9AC |
ThAT10
Biologically-Inspired Robots I |
Coffee break |
|
ThBT10
Biologically-Inspired Robots II |
Coffee break |
ThCT10
Neuro and Micro robots |
T11 | Track T11
Gallieni 3; Gallieni 3;
Gallieni 3 |
ThAT11
Computer Vision I |
Coffee break |
|
ThBT11
Computer Vision II |
Coffee break |
ThCT11
Computer Vision III |
T12 | Track T12
Gallieni A; Gallieni A; Gallieni A |
ThAT12
Marine Robotics I |
Coffee break |
|
ThBT12
Marine Robotics II |
Coffee break |
ThCT12
Field Robots III |
T13 | Track T13
Gallieni B; Rhodes 9AC; |
ThAT13
Recognition and Dexterous Manipulation |
Coffee break |
|
ThBT13
Application of Robotics and Mechatronics |
Coffee break |
ThCT13 |
|
Social event:
| Farewell reception, Acropolis, 19h-22h |
Workshops 9/26
Coffee breaks at 10h30, 16h
| Day/Hour |
|
9h-10h | 10h-11h | 11h-12h | 12h-13h | 13h-14h | 14h-15h | 15h-16h | 16h-17h | 17h-18h | 18h-19h |
|---|
| 9/26, Risso 7B | Workshop: Mobiligence: Adaptive Motor Function through Dynamic Interactions among the Body, Brain and Environment |
| 9/26, Gallieni 3 | Workshop: From motor to interaction learning in robots |
| 9/26, Rhodes 9FH | Workshop: Performance Evaluation and Benchmarking for Intelligent Robots and Systems |
| 9/26, Rhodes 9BD | Workshop: Robot Services in Aging Society |
| 9/26, Rhodes 9AC | Workshop: Workshop on Home Robotics WHR 2008 |
| 9/26, Gallieni 2 | Workshop: 2nd Workshop on Planning, Perception and Navigation for Intelligent Vehicles |
| 9/26, Rhodes 9EG | Workshop: Network Robot Systems: human concepts of space and activity |
| 9/26, Gallieni B | Workshop: Art and Robots |
| 9/26, Gallieni 5 | Workshop: 3D-Mapping |
| 9/26, Risso 6AB | Tutorial: Motion planning with the OOPSMP toolkit: A hands-on tutorial on using state-of-the-art | |
|





